
V4UAV
Este projeto foi desenvolvido como parte de minha dissertação de mestrado. Seu objetivo é o desenvolvimento de um sistema de controle, orientação e navegação para um Veículo Aéreo Não-Tripulado (VANT), utilizando técnicas de visão computacional. Este sistema deve permitir que o veículo realize a inspeção das linhas de transmissão de maneira autônoma, além de auxiliar o operador humano no pouso sobre os condutores e/ou cabos para-raio dessas linhas.
A aplicação foi desenvolvida como um pacote ROS (Robot Operating System), sendo composta por diversos nós, tópicos e serviços. Com o auxílio da biblioteca Tkinter em linguagem Python, uma interface gráfica do usuário (GUI) simples e amigável foi construída. Um modelo de detecção de objetos baseado na arquitetura YOLO e técnicas clássicas de visão computacional foram utilizados para identificar cada cabo condutor e para-raio das linhas de transmissão.
Como resultados do projeto, foi visto que o sistema é capaz de realizar a tarefa de rastreamento das linhas de transmissão de forma robusta, mesmo quando exposto a mudanças abruptas na orientação das linhas. Também foi verificado que o sistema reduz boa parte do esforço manual necessário para que um operador realize o pouso sobre as linhas de transmissão. Para mais detalhes, você pode acessar minha dissertação de mestrado aqui.
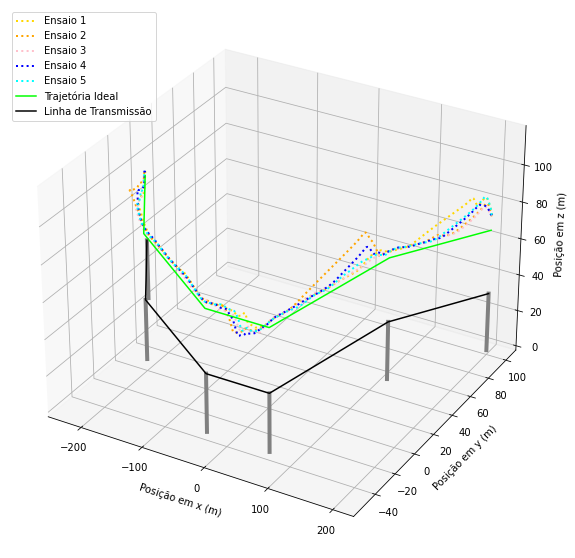
Resultados dos ensaios de rastreamento realizados